Actively looking for research internship (Summer 2026)
and full-time positions in perception, autonomy, and embodied AI.
Feel free to reach out!
I am a Ph.D. student at the
University of California, Irvine,
advised by Prof. Marco Levorato.
My research sits at the intersection of uncertainty-aware perception and
sequential decision-making for autonomous systems, asking how a machine
can act reliably when the world it observes is incomplete, noisy, or constantly shifting.
I design systems that do not merely perceive, but know what they do not know.
My work connects multi-sensor fusion with downstream planning and control,
building closed-loop pipelines that remain robust precisely where conventional
approaches break down: adverse weather, degraded sensing, and long-tail scenarios.
Recent projects span uncertainty-driven BEV SLAM, differentiable risk fields for
vision-language-action models, and adaptive split computing for resource-constrained robots.
Before UCI, I developed vision-based inspection systems and small-scale robotic platforms
at Tianjin University under
Prof. Gang Pan,
graduating with the LuKaining Professor Scholarship (Rank 1 / 255).
Deploying perception under severely constrained sensing conditions, this work
earned a Silver Award at the China International College Students'
Entrepreneurship Competition and laid the foundation for my current focus on real-world robustness.
I have translated research into practice through internships at
KLA (super-resolution for semiconductor wafer inspection),
Qcraft and CATRC (sensor fusion and embedded perception
for autonomous driving), and Microsoft (cloud infrastructure engineering),
shipping production-grade ML systems across the full stack, from edge deployment to cloud.
›[Oct 2024]Silver Award at China International College Students' Entrepreneurship Competition 2024 for PipePro: Intelligent Municipal Pipeline Inspection and Maintenance Platform.
›[Feb 2024]Paper NaviSplit accepted to WoWMoM 2024.
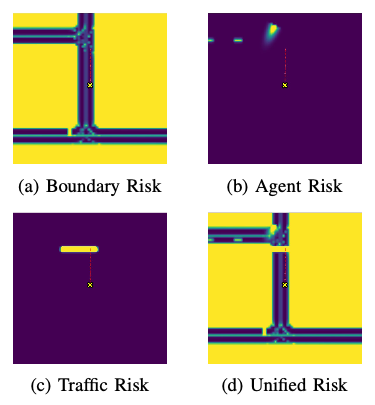
RiskGuard: A Trajectory Revision Method Based on Unified Differentiable Risk Fields for VLA
Submitted
Zixia Xia, Marco Levorato
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
A trajectory revision framework for vision-language-action models using unified
differentiable risk fields to improve safety and reliability of embodied agents.
ICCPS 2026
thumb_smartfusion.png
thumb_smartfusion_2.png
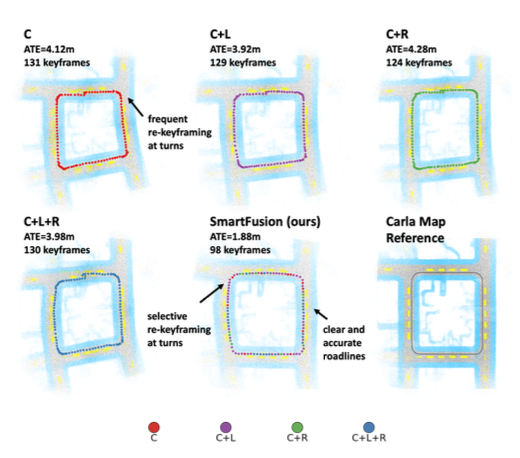
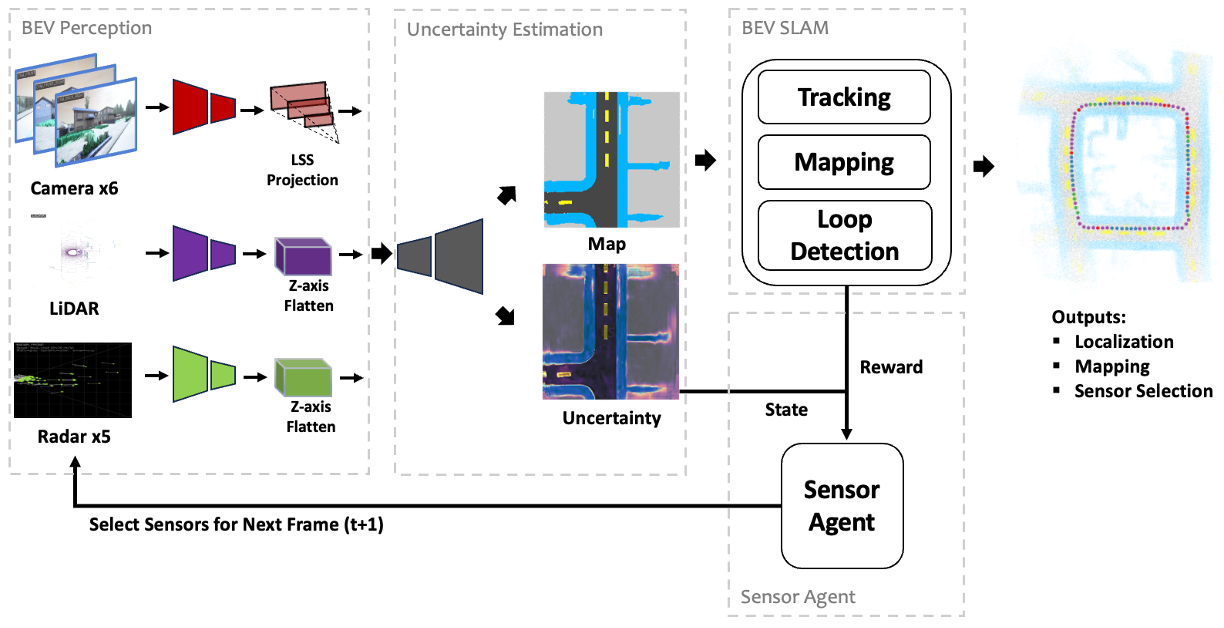
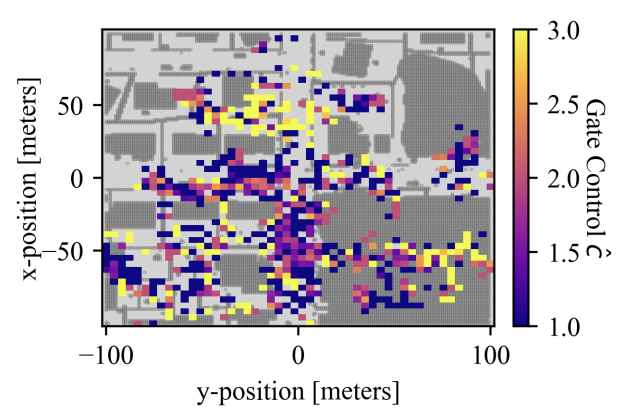
SmartFusion-SLAM: From Passive Fusion to Temporal Uncertainty-Aware Sensor Adaptation in BEV SLAM
Zixia Xia, Marco Levorato
IEEE/ACM International Conference on Cyber-Physical Systems (ICCPS), 2026
A reinforcement learning-based BEV SLAM framework that dynamically re-weights
LiDAR/Camera/Radar inputs based on real-time uncertainty states, improving
trajectory accuracy by 27% in long-tail weather scenarios.
WoWMoM 2024
thumb_navisplit.png
thumb_navisplit_2.png
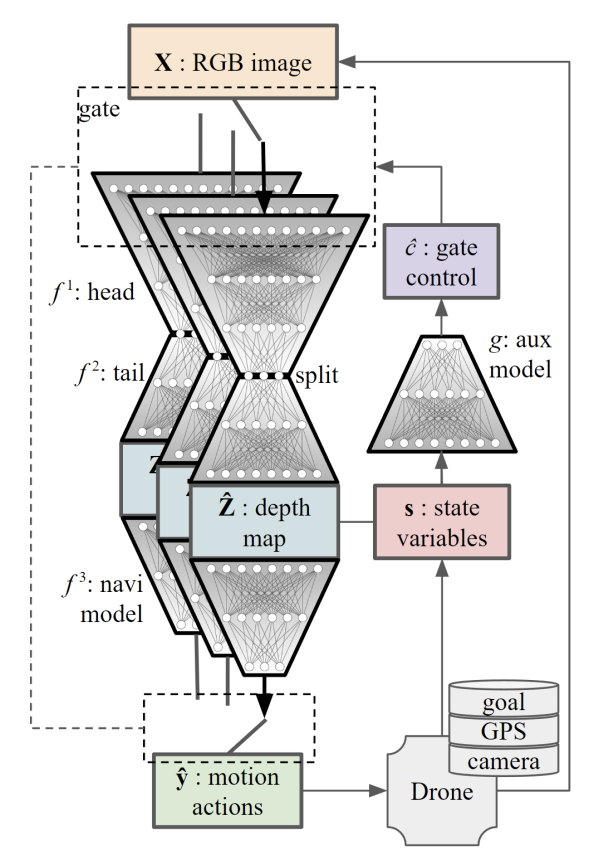
NaviSplit: Dynamic Multi-Branch Split DNNs for Efficient Distributed Autonomous Navigation
Tim K. Johnsen, Zixia Xia, Ian A. Harshbarger, Marco Levorato
IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), 2024
A deep RL policy for adaptive split computing between UAV and cloud, reducing data
transmission by 95% while maintaining >72% depth estimation accuracy for autonomous navigation.
CACAIE 2026
thumb_dgnv2.png
thumb_dgnv2_2.png
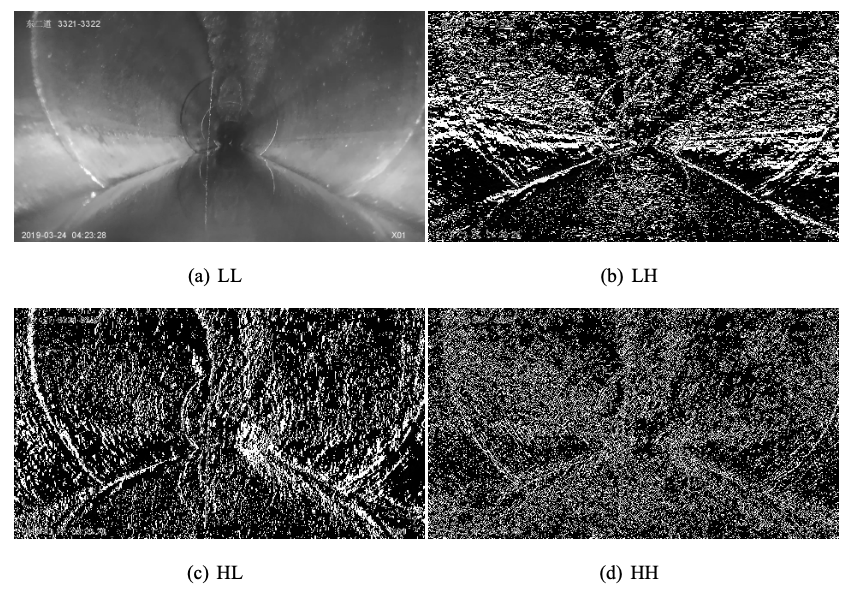
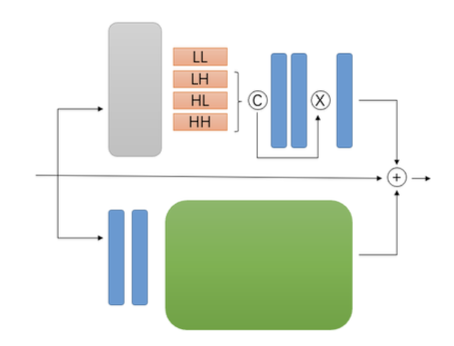
DGNv2: A DWT-Guided Frequency-Spatial Dual-Domain Dehazing Network for Sewer Inspection Images
Submitted
Gang Pan, Zhijie Sui, Zixia Xia, Chao Kang, Di Sun
Computer-Aided Civil and Infrastructure Engineering (CACAIE), 2026
A dual-domain dehazing network guided by Discrete Wavelet Transform for improving
sewer inspection image quality, with contrastive regularization for structural detail preservation.
CACAIE 2025
thumb_superres.png
thumb_superres_2.png
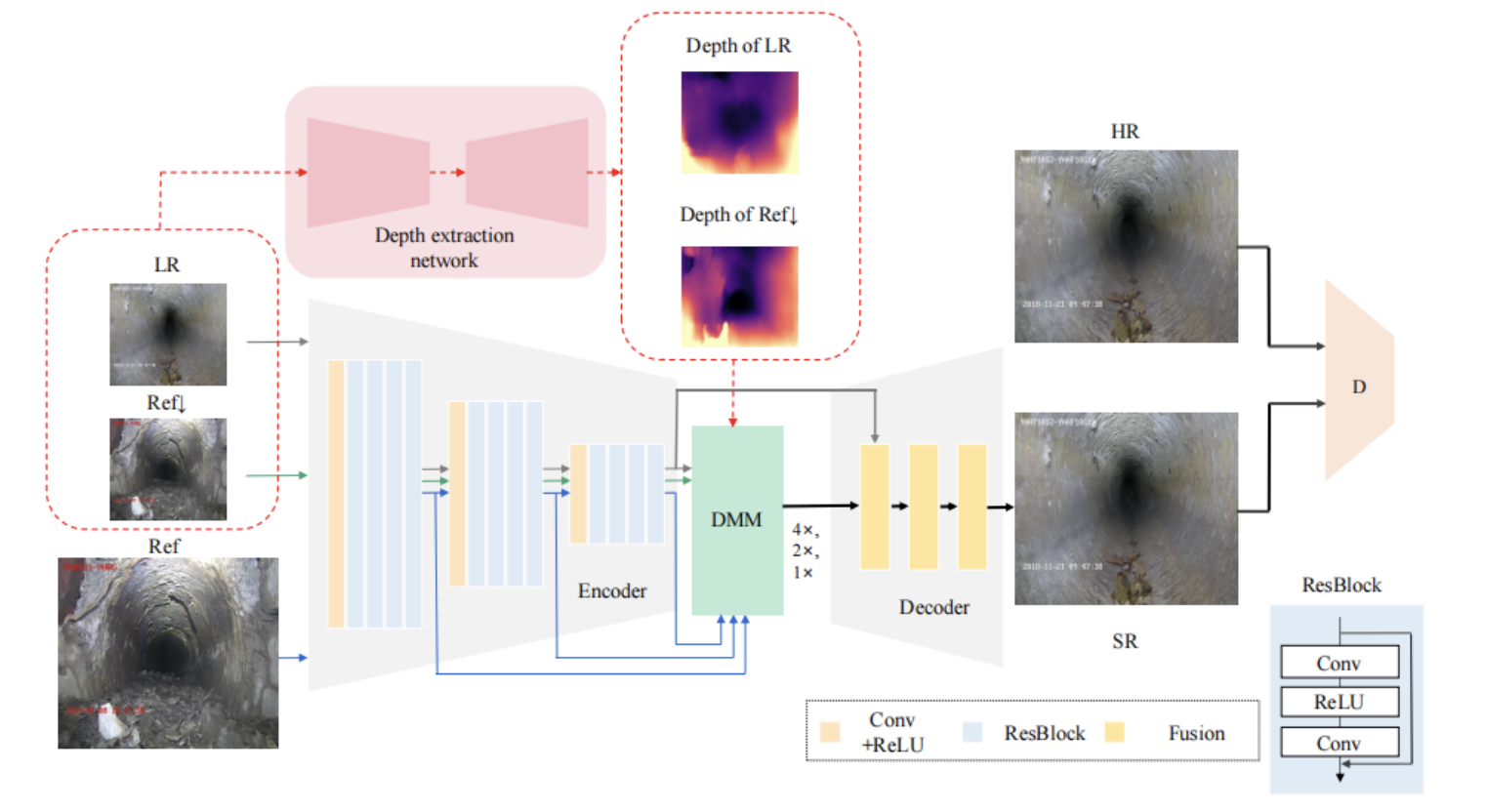
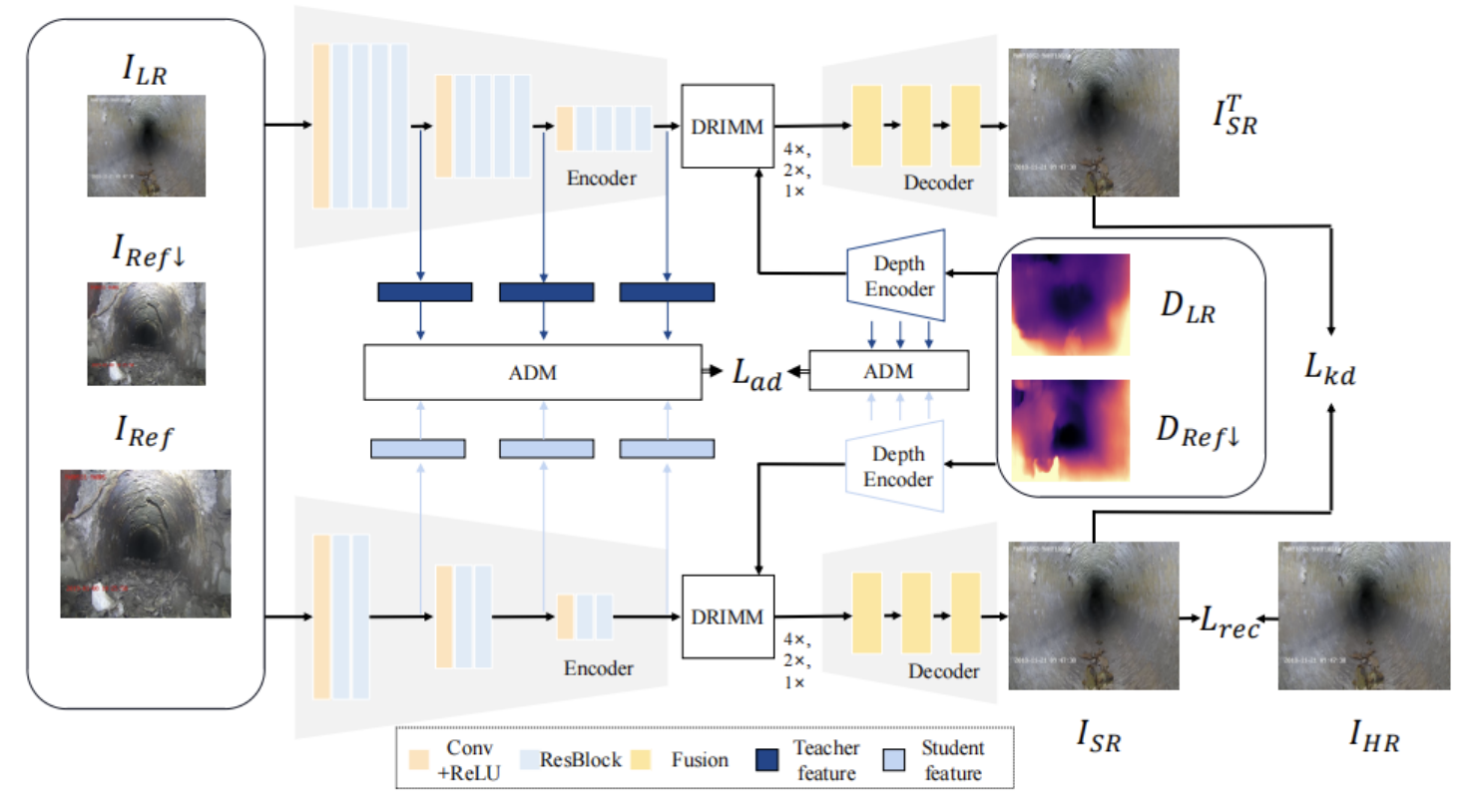
Sewer Image Super-Resolution with Depth Priors and Its Lightweight Network
Gang Pan, Chen Wang, Zhijie Sui, Shuai Guo, Yaozhi Lv, Honglie Li, Di Sun, Zixia Xia
Computer-Aided Civil and Infrastructure Engineering (CACAIE), 2025
A lightweight super-resolution network for sewer inspection images incorporating
monocular depth priors to enhance spatial detail and structural fidelity.
CACAIE 2023
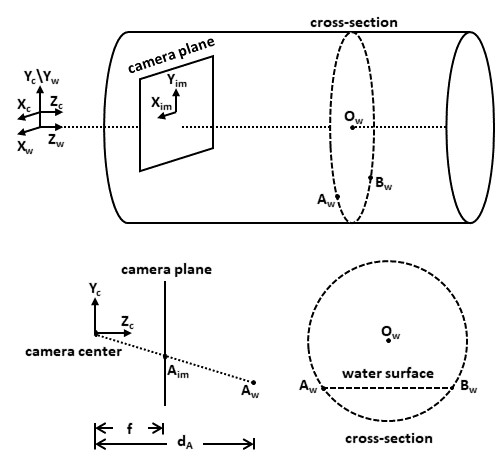
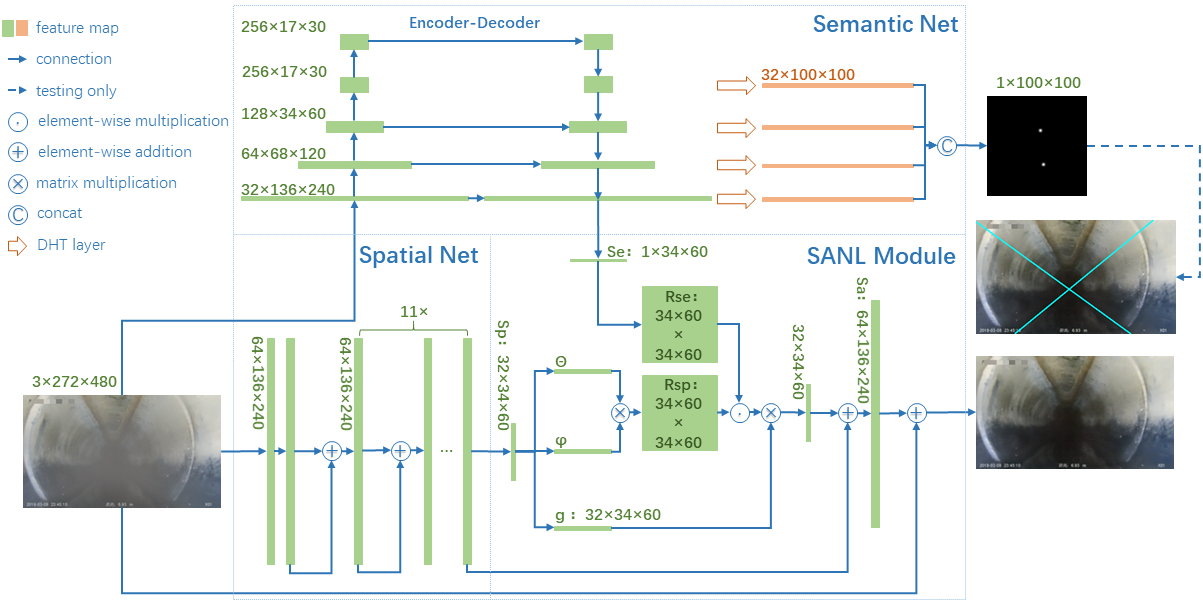
Structure-Aware Dehazing of Sewer Inspection Images Based on Monocular Depth Cues
Zixia Xia, Shuai Guo, Di Sun, Yaozhi Lv, Honglie Li, Gang Pan
Computer-Aided Civil and Infrastructure Engineering (CACAIE), 2023
SANL-Net integrates semantic and spatial attention for structure-preserving sewer image
dehazing, using camera calibration and monocular depth cues to synthesize training data.
Achieves PSNR 27.28, SSIM 0.8963 with a compact 15.47M-parameter network.
Industry Experience
KLA · Milpitas, CA
Jun – Sep 2025
Machine Learning Engineer Intern
Super-ResolutionModel Fine-TuningSynthetic Data
Built a physics-based synthetic data generation pipeline simulating optical distortions;
fine-tuned RCAN models improving geometric reconstruction robustness by 18%.
Qcraft Inc. · Beijing / Santa Clara
Mar – Aug 2023
Research Intern · Autonomous Driving
Multi-GPU TrainingSensor FusionLiDAR-Camera
Enhanced CenterNet with adaptive heatmaps and weighted loss, boosting rare-class mAP by 3.1%;
engineered a high-precision LiDAR-Camera fusion module with AbsRel < 0.07.
Microsoft Corporation · Suzhou, China
Jun – Sep 2022
Software Engineer Intern
Active DirectoryCloud InfrastructurePowerShell
Implemented PowerShell cmdlets for large-scale Active Directory tenant relocation
and built a size-aware handler for cluster load balancing.
China Automotive Technology and Research Center · Tianjin
May – Jul 2019
Research Intern · Autonomous Driving
Embedded DLJetson TX2Real-Time Detection
Deployed lightweight YOLO-V3 on Jetson TX2 for real-time traffic sign detection,
reducing model parameters by 32% with comparable accuracy.